Objective:
Design and program a catapult apparatus capable of accurately launching projectiles across various distances.
Responsibilities:
Implement the feedback control system.
Tools:
MATLAB/Simulink
Timeline:
4 months
Project Summary
This project was done in teams of 4. Each was responsible for a different portion of the design and implementation, which included mechanical, electrical and software components. My role was to configure the feedback control system in Simulink to obtain a repeatable behaviour that we desired. This included having the following features:
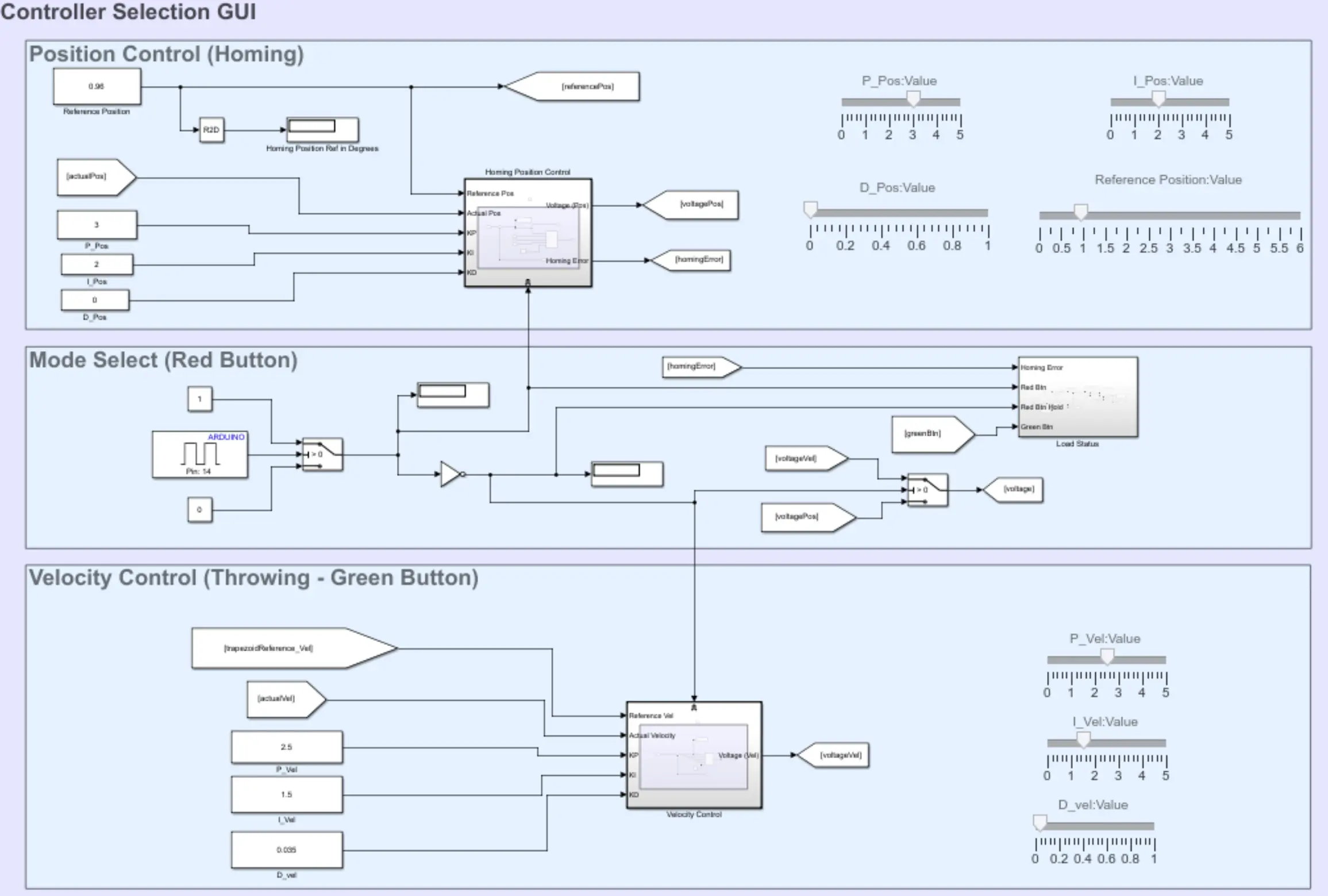
System GUI
Project Outcomes
Our design was successful in launching the chosen projectile. In our case, we chose a wooden ball and we were able to launch it into the target on the first try.